Введение в системы управления: работа, типы и приложения
Вы используете системы управления всякий раз, когда машина автоматически поддерживает стабильное значение, например температуру, скорость или уровень.В этой статье объясняется, что такое система управления, как ее части работают вместе и как обратная связь обеспечивает правильность выходных данных.Также вы увидите основные типы систем и то, как они ведут себя в работе.Включены общие способы использования, преимущества и ограничения.Каталог
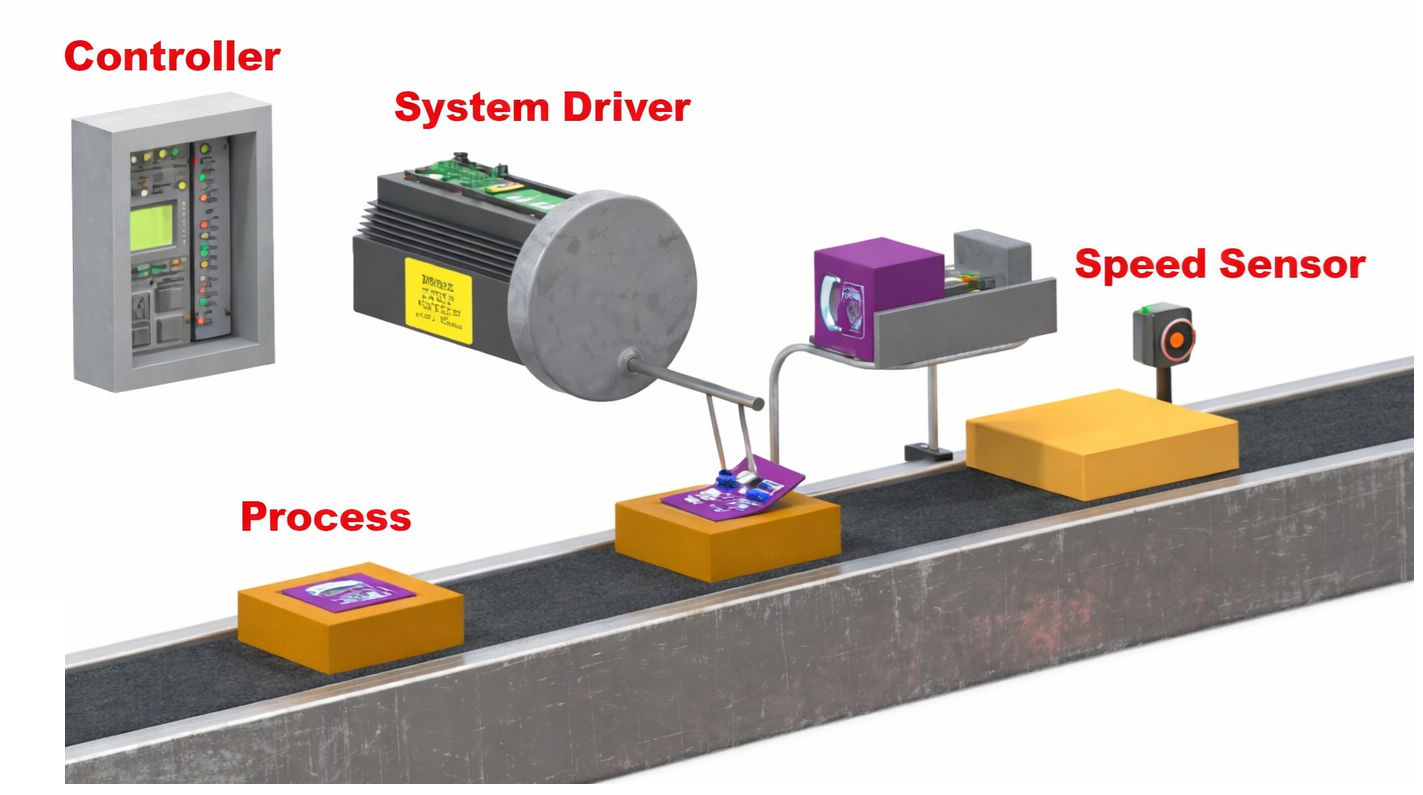
Рисунок 1. Пример системы управления
Что такое система управления?
Система управления – это система, которая удерживает измеренное значение близко к желаемому целевому значению.Его цель — автоматически регулировать процесс, чтобы результат оставался правильным даже при изменении условий.Например, комнатный термостат поддерживает температуру около заданного уровня, а автомобильный круиз-контроль поддерживает выбранную скорость автомобиля.Контроллер уровня резервуара для воды также поддерживает высоту воды на выбранной отметке.Проще говоря, система управления постоянно проверяет и корректирует переменную, чтобы она соответствовала требуемому значению.
Основные элементы системы управления
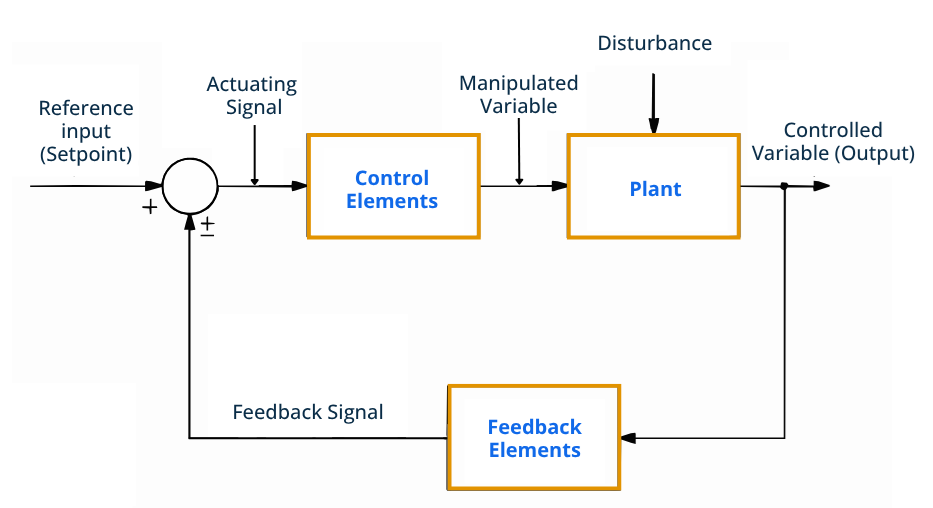
Рисунок 2. Блок-схема системы управления
Система управления состоит из нескольких стандартных частей, каждая из которых выполняет определенную задачу.
• Опорный вход (уставка)
Это желаемое значение, которое система пытается поддерживать.Он представляет выбранное целевое состояние.Система всегда сравнивает фактическое значение с этим эталоном.
• Управляющий сигнал
Это сигнал, полученный после сравнения желаемого и фактического значений.Он показывает, насколько необходима корректировка.Сигнал подготавливает систему к коррекции.
• Элементы управления
Эти части управляют процессом принятия решений.Они определяют корректирующие действия на основе полученного сигнала.Результаты этого этапа подготавливают процесс к корректировке.
• Управляемая переменная
Это регулируемое количество, направляемое в процесс.Изменение этого значения влияет на конечный результат.Это переменная, которую система может напрямую изменять.
• Завод
Растение – это управляемый процесс.Он производит окончательное выходное значение.Система стремится поддерживать этот результат на желаемом уровне.
• Беспокойство
Это нежелательное изменение, влияющее на процесс.Это может отодвинуть выходной сигнал от желаемого значения.Система должна это компенсировать.
• Управляемая переменная (выход)
Это фактически измеренный результат процесса.Он показывает текущее состояние системы.Цель состоит в том, чтобы сохранить его равным эталонному входу.
• Элементы обратной связи
Они измеряют выходные данные и отправляют информацию обратно для проверки.Они обеспечивают систему текущим состоянием.Это позволяет определить поправку.
• Сигнал обратной связи
Это возвращаемая информация о выходном значении.Он отражает состояние процесса.Система использует его для сравнения.
Принцип работы системы управления
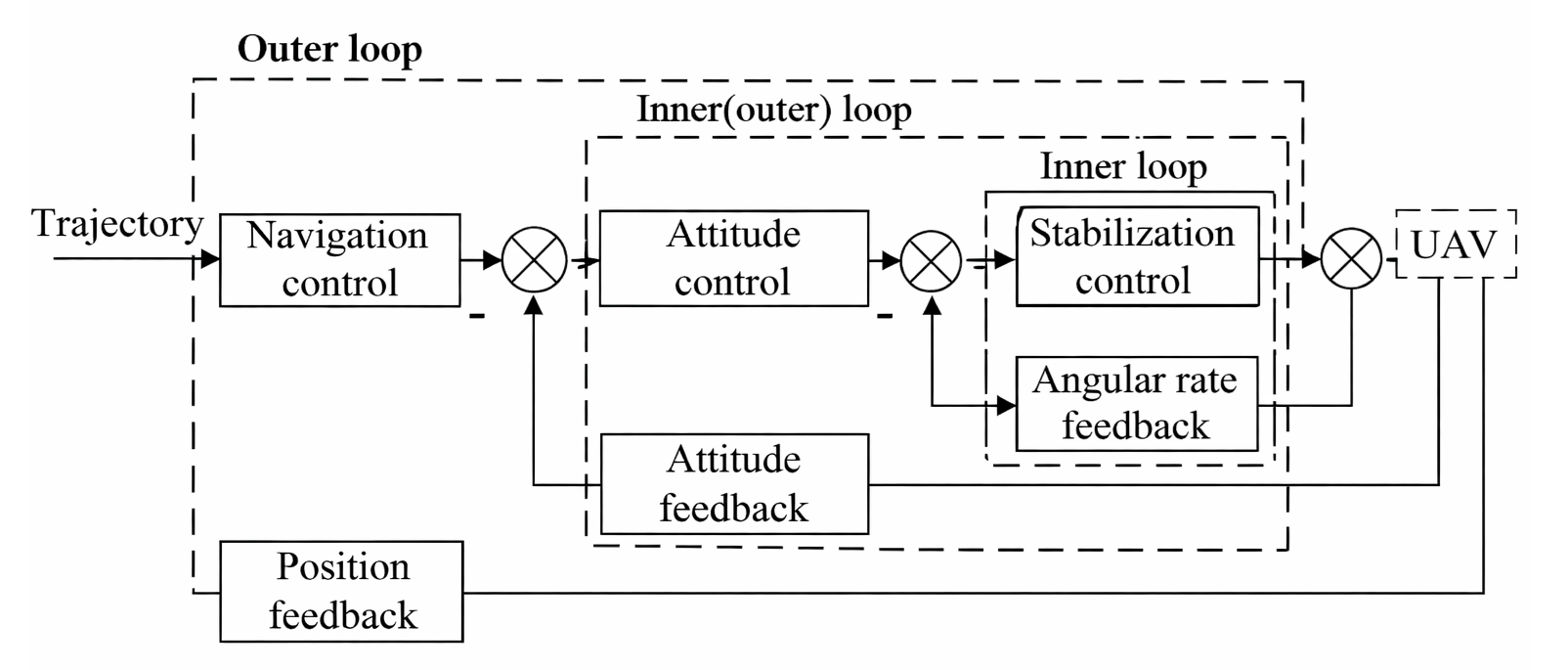
Рисунок 3. Принцип работы системы управления
Принцип работы системы управления начинается с подачи в систему желаемого входного значения.Затем система сравнивает это значение с фактическим выходным значением.Разница между ними называется сигналом ошибки.Если ошибка существует, система генерирует корректирующий сигнал.Эта коррекция корректирует процесс, чтобы уменьшить ошибку.Выходной сигнал изменяется и постоянно проверяется снова.Цикл повторяется до тех пор, пока выходные данные не будут точно соответствовать желаемому значению.
Характеристики систем управления
Системы управления оцениваются на основе того, насколько хорошо они работают во время работы.Эти характеристики описывают качество и надежность реакции системы.
|
Характеристики |
Описание |
|
Стабильность |
Выходные данные
не расходиться;возвращается к устойчивому значению после возмущения |
|
Точность |
Итоговая ошибка ≤
±2–5% от заданного значения |
|
Точность |
Выход
отклонение ≤ ±1% при одном и том же входном сигнале |
|
Время ответа
|
Начальный
реакция происходит в пределах измеренного времени задержки (td) |
|
Время подъема |
Время от 10%
до 90% от конечной стоимости |
|
Время урегулирования |
Входит и
остается в пределах диапазона ±2% |
|
Перерегулирование |
Пик превышает
окончательная стоимость в % суммы |
|
Стационарный
Ошибка |
Константа
смещение, оставшееся после стабилизации |
|
Чувствительность |
ΔВыход/
ΔКоэффициент изменения параметра |
|
Надежность |
Поддерживает
работа несмотря на изменение помех |
|
Пропускная способность |
Действует
эффективно до частоты среза до −3 дБ |
|
Повторяемость |
Тот же ввод
производит тот же результат в пределах допуска |
|
Надежность |
Действует
безотказная работа за номинальное время работы (MTBF) |
|
Демпфирование |
Колебания
затухание определяется коэффициентом затухания ζ |
|
Скорость
Ответ |
Общее время до
достичь стабильного состояния |
Типы систем управления
Системы управления классифицируются в зависимости от того, как они обрабатывают информацию, сигналы и поведение реагирования.Они сгруппированы в соответствии с использованием обратной связи, формой сигнала и математическим поведением.
Разомкнутая система управления
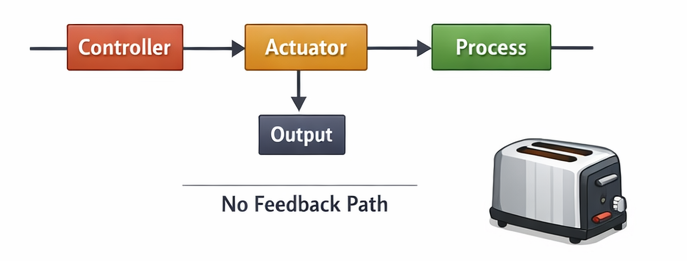
Рисунок 4. Схема системы управления с разомкнутым контуром.
Система управления с разомкнутым контуром — это система, в которой выходной сигнал не влияет на управляющее действие.Система отправляет команду и предполагает, что результат правильный, не проверяя его.Поскольку отсутствует канал обратной связи, он не может автоматически исправлять ошибки или помехи.Производительность зависит главным образом от правильной калибровки и условий эксплуатации.Эти системы просты, недороги и просты в проектировании.Однако изменения нагрузки или окружающей среды могут повлиять на конечный результат.Общие примеры включают таймер электрического тостера, таймер стиральной машины и фиксированный таймер полива.
Система управления с замкнутым контуром
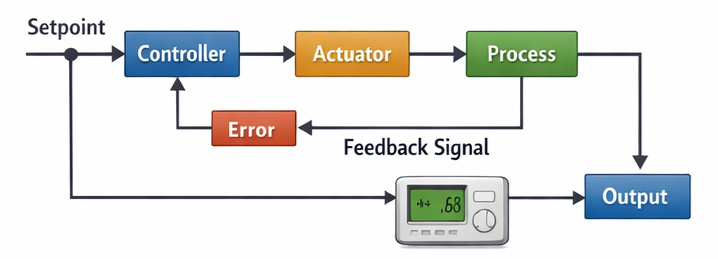
Рисунок 5. Схема системы управления с обратной связью.
Система управления с обратной связью — это система, которая использует обратную связь для автоматической регулировки своего выхода.Система измеряет результат и сравнивает его с желаемым значением.Если появляется разница, применяется коррекция для уменьшения ошибки.Эта непрерывная регулировка обеспечивает точную и стабильную работу даже при изменении условий.Системы с замкнутым контуром обеспечивают лучшую точность и надежность, чем системы с разомкнутым контуром.Они широко используются в современных приложениях автоматического управления.Типичные примеры включают контроль температуры кондиционера, круиз-контроль автомобиля и автоматические регуляторы напряжения.
Система непрерывного управления
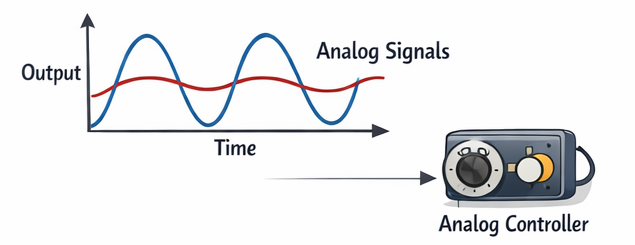
Рисунок 6. Непрерывный (аналоговый) управляющий сигнал
Система непрерывного управления обрабатывает сигналы, которые плавно изменяются во времени.Ввод и вывод существуют в каждый момент времени без перерыва.Эти системы обычно работают с аналоговыми электрическими или механическими сигналами.Поскольку сигналы непрерывны, реакция также плавная и естественная.Системы непрерывного времени обычно встречаются в традиционных аналоговых контроллерах.Они подходят для физических процессов, требующих немедленной реакции.Примеры включают аналоговые регуляторы скорости, регулятор громкости аудиоусилителя и контроль положения гидравлического клапана.
Дискретно-временная система управления
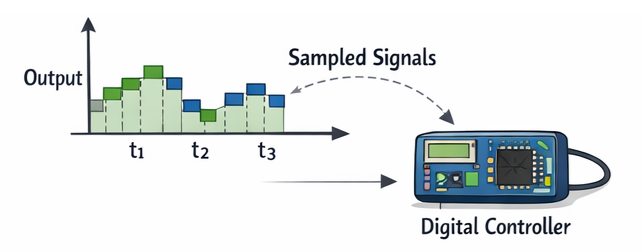
Рисунок 7. Дискретный (цифровой) управляющий сигнал
Система управления с дискретным временем работает с использованием дискретизированных сигналов данных.Система проверяет и обновляет значения только через определенные промежутки времени.Эти сигналы обычно обрабатываются цифровыми контроллерами или микропроцессорами.Выходные данные изменяются шаг за шагом, а не постоянно.Такие системы допускают программируемую работу и гибкую настройку.Они широко используются в современном электронном и компьютерном управлении.Примеры включают контроль температуры на основе микроконтроллера, цифровой контроль скорости двигателя и термостаты для умного дома.
Линейная система управления
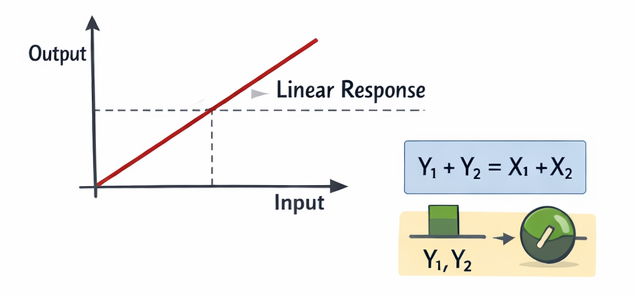
Рисунок 8. Взаимосвязь ввода-вывода линейной системы
Линейная система управления следует пропорциональному соотношению между входом и выходом.Если входные данные удваиваются, выходные данные также удваиваются при тех же условиях.Эти системы удовлетворяют принципу суперпозиции, согласно которому объединенные входные данные производят объединенные выходные данные.Линейное поведение обеспечивает предсказуемый и простой математический анализ.Большинство теоретических проектов управления для простоты предполагают линейную работу.Линейные модели помогают разрабатывать стабильные и точные системы.Примеры включают электронные усилители со слабым сигналом и области управления двигателем с низкой нагрузкой.
Нелинейная система управления
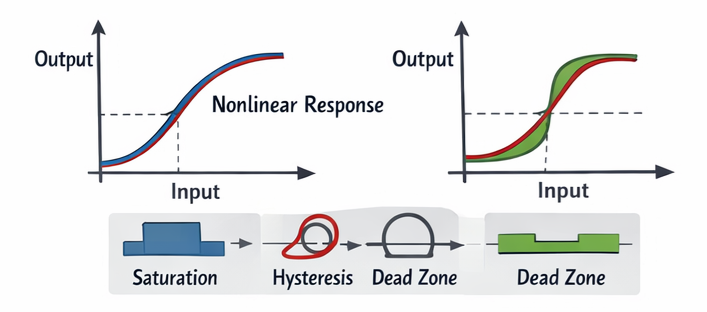
Рисунок 9. Характеристики отклика нелинейной системы
Нелинейная система управления имеет выходной сигнал, не пропорциональный входному.Реакция меняется в зависимости от рабочего диапазона или условий.Небольшие изменения на входе могут привести к большим изменениям на выходе или к их полному отсутствию изменений.Часто возникают такие эффекты, как насыщение, гистерезис и мертвые зоны.Эти системы сложнее анализировать, но они более точно представляют физические процессы.Многие системы естественным образом ведут себя нелинейно.Примеры включают ограничения движения роботизированной руки, поведение магнитного привода и управление потоком клапана в крайних положениях.
Преимущества и недостатки систем управления
Системы управления улучшают согласованность и сокращают ручные усилия, но также усложняют работу и увеличивают стоимость.
Преимущества систем управления
• Во время работы система поддерживает выходной сигнал близким к требуемому значению.
• Операторам не нужно постоянно настраивать оборудование вручную.
• Машины могут работать долгие часы без частых остановок.
• Система автоматически корректирует изменения условий.
• Статус работы можно проверить с панели или удаленного дисплея.
Недостатки систем управления
• Стоимость установки выше, чем у простых ручных систем.
• Для настройки и обслуживания необходимы квалифицированные рабочие.
• Датчики и электронные компоненты со временем могут выйти из строя.
• Поиск причины проблем может занять больше времени.
• Система зависит от стабильного электропитания.
Применение систем управления
Системы управления используются как в промышленной автоматизации, так и в бытовом оборудовании для автоматического поддержания правильной работы.
1. Промышленное производство
Производственные машины поддерживают постоянные размеры и качество продукции.Автоматизированные сборочные линии используют регулирование для обеспечения повторяемости.Это уменьшает количество отходов и повышает эффективность.
2. Регулирование температуры
Отопительное и охлаждающее оборудование поддерживает комфортные условия окружающей среды.Здания полагаются на автоматическую регулировку для стабилизации климата в помещении.Это повышает энергоэффективность и комфорт.
3. Транспортные системы
Транспортные средства используют контроль скорости и устойчивости для более плавной работы.Современные автомобили оснащены круиз-контролем и системами тяги.Они повышают безопасность вождения и производительность.
4. Энергетические системы
Электрические сети регулируют уровни напряжения и частоты.Генераторы регулируют выходную мощность в соответствии с потребностями нагрузки.Это обеспечивает стабильное электроснабжение.
5. Робототехника и автоматизация
Роботы выполняют задачи точного позиционирования и движения.Автоматизированные машины работают непрерывно с высокой точностью.Это обеспечивает передовое производство.
6. Медицинское оборудование
Устройства поддерживают контролируемые рабочие условия во время лечения.Оборудование для мониторинга удерживает значения в безопасных пределах.Это повышает безопасность и надежность пациентов.
7. Бытовая техника
Повседневные устройства автоматически управляют настройками работы.Стиральные машины и холодильники поддерживают надлежащие условия эксплуатации.Это упрощает повседневные задачи.
8. Аэрокосмические системы
Самолеты и дроны поддерживают стабильные условия полета.Автоматическое наведение сохраняет правильную ориентацию и высоту.Это обеспечивает надежную навигацию.
Система управления vs автоматизация vs встроенные системы
Эти технологии тесно связаны между собой, но служат разным инженерным целям в современной электронной и промышленной продукции.
|
Особенность |
Контроль
Система |
Автоматизация |
Встроенный
Система |
|
Основное внимание |
Регулирование
переменные |
Процесс
исполнение |
Устройство
операция |
|
Цель |
Поддерживать
желаемое значение |
Выполнять задания
автоматически |
Запуск посвященный
функции |
|
Область применения |
Конкретный
поведение процесса |
Весь
рабочий процесс
|
Одинокий
устройство продукта |
|
Решение
Возможность |
На основе
измеренные значения |
На основе
программированная логика |
На основе
прошивка |
|
Обратная связь Использование |
Часто
требуется |
Необязательно |
Необязательно |
|
Тип оборудования |
Датчики и
приводы |
Машины и
контролеры |
Микроконтроллер
доска |
|
Роль программного обеспечения |
Расчет
и исправление |
Секвенирование
и координация |
Устройство
логика управления |
|
Тип ответа |
Непрерывный
корректировка |
Задача
исполнение |
Функциональная работа |
|
Размер системы |
От маленького до
средний |
От среднего до
большой |
Очень маленький |
|
Гибкость |
Умеренный |
Высокий |
Ограниченный |
|
Время
Требование |
Высокий |
Умеренный |
Высокий |
|
Приложение
Уровень |
Уровень процесса |
Уровень завода |
Уровень продукта |
|
Пример |
Температура
контроль |
Фабрика
производственная линия |
Умные часы |
|
Интеграция |
Часть
автоматизация |
Содержит
системы управления |
Поддерживает оба |
Заключение
Системы управления поддерживают стабильность, постоянно сравнивая фактический результат с целевым значением и исправляя любые ошибки.Их производительность зависит от основных элементов, таких как обратная связь, действия контроллера и контролируемый процесс.Различные классификации определяют, как обрабатываются сигналы и насколько точно система реагирует на помехи.Благодаря этим возможностям системы управления широко применяются в промышленности, транспорте, энергетике, медицинских приборах и бытовом оборудовании.
О нас
ALLELCO LIMITED
Прочитайте больше
Быстрое запрос
Пожалуйста, отправьте запрос, мы ответим немедленно.
Часто задаваемые вопросы [FAQ]
1. В чем разница между контроллером и системой управления?
Контроллер — это всего лишь устройство принятия решений (например, ПЛК или ПИД-регулятор).Система управления включает в себя контроллер плюс датчики, исполнительные механизмы и регулируемый процесс.
2. Что такое ПИД-регулирование и почему оно важно?
ПИД-управление использует пропорциональные, интегральные и производные действия для быстрого и плавного минимизации ошибок.Это повышает стабильность, точность и скорость отклика в большинстве промышленных систем.
3. Почему системы управления иногда колеблются или колеблются?
Колебания возникают, когда коррекции слишком агрессивны или задерживаются.Плохая настройка, медленные датчики или чрезмерное усиление приводят к неоднократному выбросу выходного сигнала.
4. Что такое насыщение привода?
Насыщение привода происходит, когда привод достигает своего физического предела и не может дальше увеличивать выходную мощность.Это не позволяет системе исправлять большие ошибки.
5. Как системы управления справляются с задержками в процессах?
Они используют методы настройки, фильтры или алгоритмы прогнозирования для компенсации задержки, чтобы коррекция происходила в нужное время.

Руководство по резисторам 4,7 кОм: цветовая маркировка, использование, тестирование и сравнение значений
на 2026/02/16
Миниатюрный автоматический выключатель (MCB): принцип работы, типы, номиналы и руководство по выбору
на 2026/02/15
Популярные посты
-

Комплексный набор инструкций: как они изменили вычисления?
на 8000/04/18 147757
-

Поспинка и функции USB-C
на 2000/04/18 111931
-

Использование примитивах Unified моделирования Xilinx: комплексное руководство по проектированию и моделированию FPGA
на 1600/04/18 111349
-

Напряжения источника питания в электронике: значение VCC, VDD, VEE, VSS и GND
на 0400/04/18 83718
-

Руководство по разъему RJ45: расписка, проводка, типы кабелей и использование
на 1970/01/1 79508
-

Конечное руководство по цветовым кодам проволоки в современных электрических системах
То, как наши электрические системы используют цвета, не только для внешнего вида.Каждый цвет провода теперь указывает на определенную функцию, что облегчает правильную идентификацию и обработку эле...на 1970/01/1 66881
-

Качество (Q) Фактор: уравнения и приложения
Коэффициент качества, или «Q», важен при проверке того, насколько хорошо индукторы и резонаторы работают в электронных системах, которые используют радиочастотные (RF).«Q» измеряет, насколько хорош...на 1970/01/1 63010
-

Руководство по очистке клапана: функция, симптомы, тестирование и замена для оптимальной производительности двигателя
Клапан чистки является ключевой частью системы автомобиля, которая помогает поддерживать воздух в чистоте, управляя топливными парами, прежде чем они смогут сбежать в атмосферу.Это не только помога...на 1970/01/1 62973
-

Достижение пиковой производительности с максимальной теоремой передачи мощности
Теорема максимальной передачи мощности объясняет, как энергия из источника, такого как батарея или генератор, течет к подключенной нагрузке.Он показывает точное условие, где нагрузка получает наибо...на 1970/01/1 54081
-

Спецификации батареи A23 и совместимость
Аккумулятор A23 представляет собой небольшую батарею в форме цилиндров с высоким напряжением.Также называется 23a, 23ae или Mn21, он работает на 12 вольт и намного выше, чем батареи AA или...на 1970/01/1 52107
Горячий номер детали
-

BQ2004HSNTR
Texas Instruments
IC BATT CHG MULTI-CHEM 16SOIC
AS1000
TPI (Test Products Int)
EXTENDER SLEEVE SET
ATS137-PL-B-B
Diodes Incorporated
MAGNETIC SWITCH UNIPOLAR 3SIP
MBRF40150CT
SMC Diode Solutions
DIODE ARRAY SCHOTTKY 150V ITO220
EP3SL70F780C4N
Intel
IC FPGA 488 I/O 780FBGA
HUF76423P3
onsemi
MOSFET N-CH 60V 35A TO220-3
TS652ID
STMicroelectronics
IC VARIABLE GAIN 2 CIRCUIT 14SO
SIT1602AI-22-18E-48.000000
SiTime
MEMS OSC XO 48.0000MHZ LVCMOS
74SSTU32864CBFG
Renesas Electronics America Inc
IC BUFFER REGISTER CONF 96-LFBGA
ZM4745A-GS08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 16V 1W DO213AB
REG101NA-2.8/250
Texas Instruments
IC REG LINEAR 2.8V 100MA SOT23-5
LT5526EUF#TRPBF
Analog Devices Inc.
IC MIXR 1KHZ-2GHZ DWN CONV 16QFN
ADS5525IRGZTG4
Texas Instruments
IC ADC 12BIT 170MSPS 48-VQFN
TDA2822D
STMicroelectronics
IC AMP CLASS AB MONO/STER 1W 8SO
RT0805BRD07180RL
Yageo
RES SMD 180 OHM 0.1% 1/8W 0805
VE-J43-IW
Vicor Corporation
DC DC CONVERTER 24V 100W
CD74HC4051M96
Texas Instruments
IC MUX 8:1 130OHM 16SOIC
PC844IJ1
Sharp Microelectronics
OPTOISOLTR 5KV 4CH TRANS 16-SMD -

Q48SK12018NRFA
Delta Electronics
DC DC CONVERTER 12V 216W
VRB2405S-6WR3
Mornsun America, LLC
DC DC CONVERTER 5V 6W
1N2065
Solid State Inc.
DIODE GEN PURP 700V 275A DO9
MCF5208CAB166
NXP USA Inc.
IC MCU 32BIT ROMLESS 160QFP
CY7C1470BV33-200AXI
Infineon Technologies
IC SRAM 72MBIT PARALLEL 100TQFP
LMZ20501SILR
Texas Instruments
DC DC CONVERTER 0.8-3.6V 4W
TISP61089DR-S
Bourns Inc.
THYRISTOR 100V 30A 8SOIC
W25Q16JVSSIQ
Winbond Electronics
IC FLASH 16MBIT SPI/QUAD 8SOIC
WM8788GEDT/R
Cirrus Logic Inc.
IC ADC/AUDIO 24BIT 192K 16TSSOP
AUIRFSL8408
International Rectifier
AUTOMOTIVE HEXFET N CHANNEL
2SB1205S-TL-E
Sanyo
2SB1205 - PNP EPITAXIAL PLANAR S
CC0201GRNPO9BN100
YAGEO
CAP CER 10PF 50V C0G/NPO 0201
EP1K30QC208-2
Intel
IC FPGA 147 I/O 208QFP
R5F3650EDFA#U0
Renesas Electronics America Inc
IC MCU 16BIT 256KB FLASH 100QFP
MC100LVE222FAR2
onsemi
IC CLK BUFF DVDR MUX 2:15 52LQFP
MLZ2012M470WT000
TDK Corporation
FIXED IND 47UH 170MA 3.7 OHM SMD
LT3437HFE#PBF
Analog Devices Inc.
IC REG BUCK ADJ 500MA 16TSSOP
CY22392FXIT
Infineon Technologies
IC CLOCK GENERATOR 16TSSOP -

16RIA20
Solid State Inc.
SCR THYRISTOR 25 AMP TO 48
SN65LVDS125ADBT
Texas Instruments
IC CROSSPOINT SW 1 X 4:4 38TSSOP
SI7898DP-T1-GE3
Vishay Siliconix
MOSFET N-CH 150V 3A PPAK SO-8
FQT4N20TF
onsemi
MOSFET N-CH 200V 850MA SOT223-4
SMDJ43CA
Littelfuse Inc.
TVS DIODE 43VWM 69.4VC DO214AB
CL05A474KP5NFNC
Samsung Electro-Mechanics
CAP CER 0.47UF 10V X5R 0402
AXK710127G
Panasonic Electric Works
CONN SOCKET 10POS SMD GOLD
LMK212AB7225KD-T
Taiyo Yuden
CAP CER 2.2UF 10V X7R 0805
BZT52C22-G3-08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 22V 410MW SOD123
HI5741BIBZ
Renesas Electronics America Inc
IC DAC 14BIT A-OUT 28SOIC
12102C103MAT2A
KYOCERA AVX
CAP CER 10000PF 200V X7R 1210
RT0402BRE074R99L
YAGEO
RES SMD 4.99 OHM 0.1% 1/16W 0402
LTC1149CS#PBF
Analog Devices Inc.
IC REG CTRLR BUCK 16SOIC
REL30012
TE Connectivity Potter & Brumfield Relays
RELAY GEN PURPOSE SPST 6A 12V
GRM0335C1H7R6CA01D
Murata Electronics
CAP CER 7.6PF 50V C0G/NP0 0201
744787101
Würth Elektronik
FIXED IND 100UH 950MA 467MOHM SM
P1100EA
Littelfuse Inc.
THYRISTOR 90V 150A TO226-2
6N138-300E
Broadcom Limited
OPTOISO 3.75KV DARL W/BASE 8SMD