TB6600 Steeper Motor Controller: Pinout, Arduino Interface и как он работает
Каталог
Обзор модуля драйвера двигателя TB6600
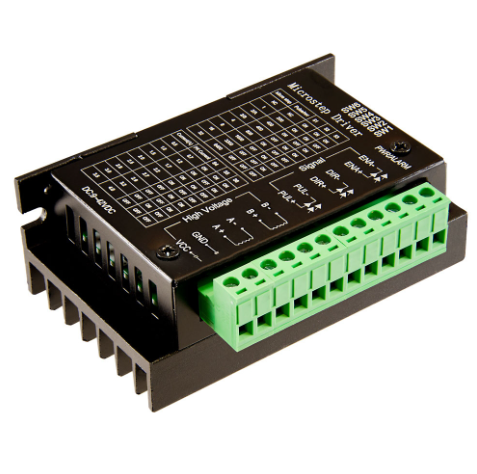
А TB6600 Модуль драйвера шагового двигателя-это устройство, отличающееся его устойчивостью и адаптивностью для управления 2-фазными шаговыми двигателями.Он легко подключается к широкому массиву микроконтроллеров, в основном Arduino, способствуя созданию точных цифровых импульсных выходов 5 В.Эти выходы динамичны для поддержания тонкого баланса управления двигателем.Работая в диапазоне напряжений 9-42 В постоянного тока и поддерживая пиковой ток 4 ампер, это универсальный выбор для различных моторных проектов.Эта адаптивность позволяет эффективно управлять моторным позиционированием и скоростью, что очень полезно в приложениях, которые направлены на минимизацию сложности кодирования.Высокочастотная изоляция модуля оптокуплера значительно повышает его надежность за счет снижения рисков интерференции и обеспечения стабильной работы.
Гармония с многочисленными микроконтроллерами делает драйвер TB6600 подходящим выбором для проектов, требующих сложного управления двигателем.Он плавно интегрируется с такими платформами, как Arduino, отражая его способность соответствовать разнообразным ожиданиям.Например, использование этого драйвера в машинах ЧПУ или 3D -принтеров позволяет точно и контролируемому движению, что иллюстрирует его полезность в различных областях.
Этот модуль выделяется благодаря поддержке 2-фазных и 4-фазных шаговых двигателей, так и гибридных конфигураций.Биполярная конструкция H-мостового моста является неотъемлемой частью эффективного управления напряжением и током, что обеспечивает пиковую производительность в своих приложениях.В средах, где точность и надежность приоритеты, такие как автоматизированные производственные линии и робототехника, эти функции высоко ценятся.
Функции
|
Особенность |
Описание |
|
Тип драйвера |
Биполярный драйвер DC Bipolar H-Bridge |
|
Вывод параметры тока |
8 типов (от 0,5 до 3,5А), выбираемые до 4 ампер |
|
Режимы подразделения |
Разделяется до 32, выбираемых на 6 режимов |
|
Параметры микроэлектрических шагов |
8 видов (1, 2/а, 2/b, 4, 8, 16, 32) |
|
Изоляция входного сигнала |
Высокоскоростное фотоэлектрическое разделение |
|
Интерфейс |
Полный стандартный интерфейс единого импульса |
|
Функция удержания в автономном режиме |
Да |
|
Экологическая пригодность |
Полузащиленное тело для суровых средств |
|
Функция блокировки мощности |
Полуавтоматический, энергосберегающий |
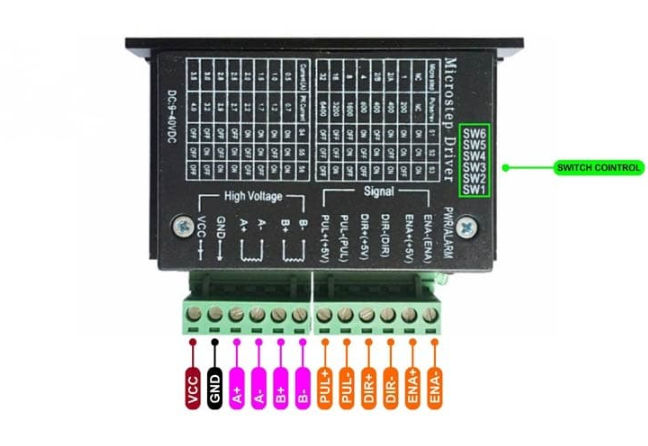
Конфигурация PIN
Технические характеристики
|
Спецификация |
Подробности |
|
Рабочее напряжение |
9-40V DC |
|
Выходной ток |
0,7A-4,0A (выбирается в 8 шагах через DIP-переключатели) |
|
Входная частота импульса |
До 20 кГц |
|
Входные уровни сигнала |
5 В уровни сигнала |
|
Пульс за революцию |
200-6400 |
|
Ток логического сигнала |
8A-15A |
|
Совместимость с двигателем |
Подходит для 2-фазных и 4-фазных шаговых двигателей |
|
Особенности защиты |
Перегрузка, перегрев защиты |
|
Входная изоляция |
Оптически изолирован |
|
Устойчивость к изоляции |
500 мегхм |
|
Поддерживаемый режим |
Режим PUL/FIR |
|
Расходы |
Бюджетный |
Конфигурация схемы H-мостового для TB6600
Модуль драйвера шагового двигателя TB6600 представляет собой серьезный компонент, предназначенный для управления как двухфазными, так и 4-фазными шаговыми двигателями, используя биполярную конфигурацию H-Bridge для эффективной работы.В этой конфигурации используются транзисторы MOSFET для обеспечения высокой производительности с точки зрения обработки тока и тепловой стабильности.Модуль работает путем взаимодействия с двумя первичными контрольными штифтами: шагом, который запускает двигатель, шагающий с каждым импульсом, и штифтом направления, который определяет направление вращения двигателя на основе приложенного напряжения.Вместе эти входы обеспечивают точный контроль над шагом двигателя и направлением вращения.
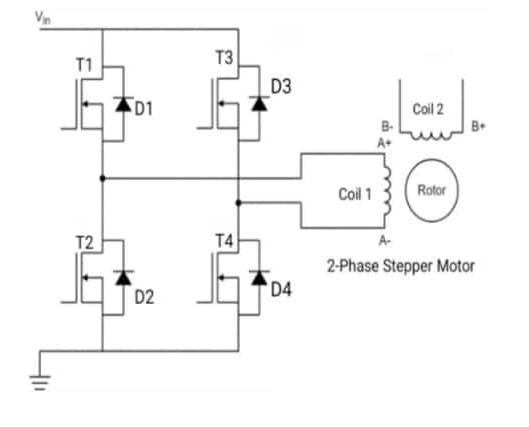
Схема схемы выделяет четыре ключевых транзистора, T1, T2, T3 и T4, расположенные в структуре H-мостика.Эти МОСФЕТЫ являются основой работы модуля, что позволяет иметь двунаправленный поток тока, необходимый для управления шаговым двигателем.Кроме того, диаграмма включает в себя диоды обработки (D1, D2, D3 и D4), которые являются ключом для защиты цепи от пиков напряжения, вызванных индуктивной нагрузкой двигателя.Эти диоды предотвращают перегрузку и повреждение чувствительных компонентов во время работы.A+, A-, B+и B-клеммы используются для подключения двигателя, обеспечивая точное и контролируемое движение моторного вала.
Как H-мост обеспечивает вращение двигателя?
Драйвер TB6600 работает через скоординированное действие транзисторов MOSFET в H-мостике.Например:
• Вращение по часовой стрелке происходит, когда транзисторы T1 и T4 активируются, направляя поток тока от A+ до A-.
• Вращение против часовой стрелки происходит, когда T2 и T3 задействованы, обращая вспять текущий поток от A- до A+.
Эта чередующаяся активация транзисторов обеспечивает плавное двунаправленное движение.Для достижения оптимального крутящего момента и эффективной работы необходимы точное время и регулирование напряжения.
Режимы работы для универсального управления
TB6600 поддерживает четыре различных режима эксплуатации, каждый из которых предназначен для баланса крутящего момента, точности и размера шага, в зависимости от требований применения:
• Волновой режим: В этом режиме только одна катушка энергична за раз.Активация одной катушки вращает двигатель на 90 градусов в одном направлении, в то время как обращение тока вращает его в противоположном направлении.Чередуя катушки, двигатель достигает непрерывной работы.Этот режим прост, но обеспечивает меньше крутящего момента по сравнению с другими режимами.
• Полный шаг режим: Обе катушки включены одновременно в этом режиме, генерируя более сильное магнитное поле.Это приводит к увеличению крутящего момента, что делает его идеальным для приложений, требующих большей мощности и стабильности.
• Полушаговый режим: Комбинация режима волны и полного шага, этот режим чередуется между энергией одной катушки и обеих катушек.Это эффективно уменьшает размер шага до 45 градусов, обеспечивая баланс между точностью и крутящим моментом.Тем не менее, крутящий момент может варьироваться в зависимости от того, являются ли одна или обе катушки под напряжением на определенном шаге.
• Режим микростепа : Наиболее точный из всех режимов, режим микростепа еще больше уменьшает размер шага, тщательно модулируя ток через фазы двигателя.Это достигается с использованием расширенных схем для создания гладких и постепенных переходов между шагами.Этот режим идеально подходит для приложений, требующих высокой точности и последовательного крутящего момента, таких как машины ЧПУ или робототехника.
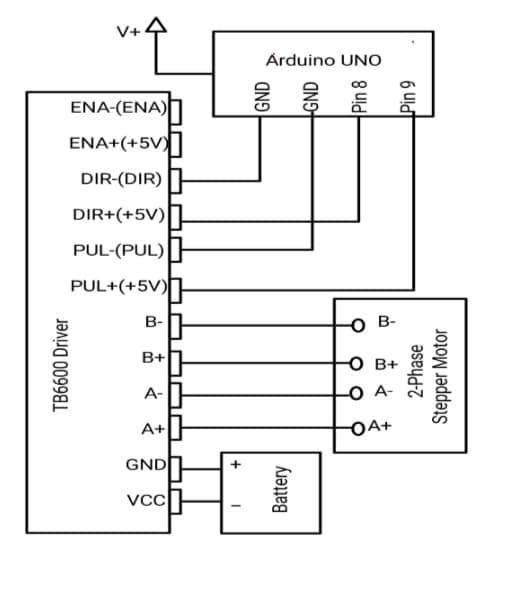
Интеграция TB6600 с Arduino Uno
Эффективное управление шаговыми двигателями требует комбинации надежного аппаратного и тщательно запрограммированного программного обеспечения.TB6600 Stepper Motor Driver выделяется как отличный инструмент для работы 2-фазных шаговых двигателей.Он поддерживает несколько режимов эксплуатации, таких как волна, полная шага, полушаговая и микроэпптинг.Его встроенные функции защиты, в том числе гарантия от низкого напряжения, перегрузки и перегрева, сделают его солидным выбором для проектов, требующих точности и долговечности.
Чтобы настроить TB6600 с помощью Arduino Uno, собрайте следующие компоненты:
• arduino uno r3
• TB6600 Stepper Motor Driver (4A версия)
• Шаповый двигатель (с рекомендованным рейтингом 1,65А)
• Надежный источник питания (например, аккумулятор или регулируемый источник питания постоянного тока)
• перемычки
• Arduino IDE установлен на вашем компьютере
Чтобы интегрировать TB6600 с Arduino, следуйте этим подробным инструкциям
Подключить направление и импульсные сигналы
• Свяжите терминалы DIR+ и PUL+ на TB6600 с Arduino Pins 8 и 9 соответственно.Эти булавки посылают направление и импульсные сигналы.
• Прикрепите направление и пульсные клеммы к выводу земли (GND) Arduino.
• Подключите двигатель к TB6600: прикрепите провода шагового двигателя к терминалам TB6600.
• A+ и A- для одной катушки двигателя.
• B+ и B- для другой катушки.
• Включите драйвер TB6600: подключите контакты VCC и GND на TB6600 к вашему источнику питания.Убедитесь, что напряжение соответствует требованиям вашего двигателя и водителя, чтобы избежать повреждений.
Регулирование разрешения микростепа
TB6600 позволяет точно настроить точность движения шагового двигателя, используя переключатели SW1 и SW2.Отрегулируйте эти переключатели следующим образом:
• ¼ Шаг разрешения: установите SW1 и SW2.
• ⅛ Разрешение шага: установите SW1 и SW2 на.
• 1/32 этап.
• Режим полного шага: установите как SW1, так и SW2.
Таблица истины
|
SW2 |
Разрешение микростепа |
|
ВЫКЛЮЧЕННЫЙ |
1/32 шаг |
|
НА |
1/8 шаг |
|
ВЫКЛЮЧЕННЫЙ |
1/4 шага |
|
НА |
Полный шаг |
Корректировки переключателя позволяют оптимизировать баланс между точностью и скоростью в зависимости от потребностей вашего проекта.
Чтобы убедиться, что ваш двигатель работает в пределах безопасного тока, TB6600 имеет дополнительные переключатели (SW4 и SW6) для регулировки потока тока.Эти настройки полезны для:
• Предотвращение повреждения перегрузки.
• Поддержание постоянной моторной производительности.
• Всегда убедитесь, что ток двигателя остается ниже максимума водителя 4А для защиты обоих компонентов.
• Направление двигателя управления: если вы хотите, чтобы двигатель вращался против часовой стрелки, измените состояние PIN -кода DIR+ в вашем коде Arduino.
• Тестирование и устранение неполадок: после завершения настройки загрузите базовый эскиз управления двигателем Stepper, чтобы проверить функциональность проводки и драйвера.
• Избегайте перегрева: обеспечить правильную вентиляцию для драйвера TB6600, особенно в приложениях с высоким током.
Приложения
Модуль TB6600 играет активную роль в многочисленных секторах, где используется тщательное управление двигателем.Его адаптируемость сияет в различных реализациях, которые подчеркивают его уникальные возможности:
Позиционирование антенны
В области телекоммуникаций достижение оптимального выравнивания антенны является обязательным для приема и передачи качества.TB6600 облегчает точное движение, тем самым повышая эффективность систем связи.
Управление моторным управлением
В рамках автоматизации и робототехники точная обработка шаговых двигателей достигается с помощью TB6600, что позволяет уточнить точность движения и надежность системы обеспечения.
Операции с ЧПУ
Для компьютерных численных управления (CNC) TB6600 повышает сложные процессы резки и фрезерования, что позволяет вам поддерживать высокий уровень точности и повторяемой точности в своей работе.
3D -печать точности
В Additive Manufacturing, особенно 3D -печати, TB6600 предлагает подробное управление двигателем, поддерживая точное расположение головок печати, необходимых для создания комплексных форм и форм.
Сложный моторный контроль
Модуль полезен для замысловатых задач управления двигателем в комплексных системах автоматизации, повышения эффективности и обеспечения утонченного управления.
Управление скоростью, положением и вращением
TB6600 превосходит в сценариях, требующих точной скорости и контроля вращения, в основном используемых для оптимизации производительности в постоянно меняющихся средах.
Устройства визуализации и банковские системы
Модуль поддерживает надежную работу камер и банкоматов, обеспечивая плавные, точные двигательные движения, что протягивает эксплуатационную продолжительность жизни устройств.
Точность в гравировке
Для инструментов гравюры и оборудования TB6600 обеспечивает точный контроль, необходимый для выполнения мелко детализированных дизайнов, что является опасным фактором в отраслях, где доминируют точность и детали.
О нас
ALLELCO LIMITED
Прочитайте больше
Быстрое запрос
Пожалуйста, отправьте запрос, мы ответим немедленно.
Часто задаваемые вопросы [FAQ]
1. Какой источник питания я должен использовать для драйвера TB6600?
Драйвер двигателя TB6600 работает с напряжением источника питания между 8 В до 45 В.
2. Как я могу контролировать скорость шагового двигателя с помощью TB6600?
TB6600 использует модуляцию импульсной ширины (ШИМ) для регулировки скорости двигателя.Вы можете изменить скорость, изменяя частоту ШИМ.
3. Может ли TB6600 поддерживать высокопрочные шаговые двигатели?
Да, TB6600 может обрабатывать до 4,5А, что делает его совместимым с шаговыми двигателями, оцененными в соответствии с этим током.
4. Как изменить направление двигателя с помощью TB6600?
Чтобы изменить направление двигателя, переключите последовательность входных сигналов на контрольных контактах (например, в 1-in2-in3-in4 для прямого, IN4-in3-in2-in1 для обратного).
5. Могу ли я подключить шаговый двигатель с более чем 4 проводами к TB6600?
TB6600 создан для 4-проводных шаговых двигателей.Если в вашем моторе есть более 4 проводов, вам понадобится другой драйвер.
6. Совместим ли TB6600 с шаговым двигателем NEMA23?
TB6600 хорошо работает с двигателями NEMA17, но, как правило, не подходит для двигателей NEMA23 из -за их более высоких текущих требований.

Полное руководство по регулируемому ИК-датчику E18-D80NK
на 2024/12/12
DS3231 RTC Модуль объяснил: диаграмма PIN, спецификации и взаимодействие микроконтроллера
на 2024/12/12
Популярные посты
-

Комплексный набор инструкций: как они изменили вычисления?
на 8000/04/18 147757
-

Поспинка и функции USB-C
на 2000/04/18 111931
-

Использование примитивах Unified моделирования Xilinx: комплексное руководство по проектированию и моделированию FPGA
на 1600/04/18 111349
-

Напряжения источника питания в электронике: значение VCC, VDD, VEE, VSS и GND
на 0400/04/18 83719
-

Руководство по разъему RJ45: расписка, проводка, типы кабелей и использование
на 1970/01/1 79508
-

Конечное руководство по цветовым кодам проволоки в современных электрических системах
То, как наши электрические системы используют цвета, не только для внешнего вида.Каждый цвет провода теперь указывает на определенную функцию, что облегчает правильную идентификацию и обработку эле...на 1970/01/1 66892
-

Качество (Q) Фактор: уравнения и приложения
Коэффициент качества, или «Q», важен при проверке того, насколько хорошо индукторы и резонаторы работают в электронных системах, которые используют радиочастотные (RF).«Q» измеряет, насколько хорош...на 1970/01/1 63010
-

Руководство по очистке клапана: функция, симптомы, тестирование и замена для оптимальной производительности двигателя
Клапан чистки является ключевой частью системы автомобиля, которая помогает поддерживать воздух в чистоте, управляя топливными парами, прежде чем они смогут сбежать в атмосферу.Это не только помога...на 1970/01/1 62987
-

Достижение пиковой производительности с максимальной теоремой передачи мощности
Теорема максимальной передачи мощности объясняет, как энергия из источника, такого как батарея или генератор, течет к подключенной нагрузке.Он показывает точное условие, где нагрузка получает наибо...на 1970/01/1 54081
-

Спецификации батареи A23 и совместимость
Аккумулятор A23 представляет собой небольшую батарею в форме цилиндров с высоким напряжением.Также называется 23a, 23ae или Mn21, он работает на 12 вольт и намного выше, чем батареи AA или...на 1970/01/1 52111
Горячий номер детали
-

C8051T606-ZMR
Silicon Labs
IC MCU 8BIT 1.5KB OTP 10QFN
MCF51AC256BCLKE
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 80LQFP
R5F101LCAFB#30
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 64LQFP
TSC102IPT
STMicroelectronics
IC CURR SENSE 1 CIRCUIT 8TSSOP
AD8004ARZ-14-REEL7
Analog Devices Inc.
IC OPAMP CFA 4 CIRCUIT 14SOIC
170M2109
Eaton - Bussmann Electrical Division
FUSE SQUARE 160A 1.2KV RECT
CSTLS8M00G56-B0
Murata Electronics
CERAMIC RES 8.0000MHZ 47PF T/H
PIC18F23K22-I/SP
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SPDIP
MIC5301-3.0YD5
Micrel Inc.
IC REG LINEAR 3V 150MA TSOT23-5
SPMWHT541ML5XAWMS5
Samsung Semiconductor, Inc.
LED LM561C WARM WHT 2700K 4SMD
DAC7551TDRNRQ1
Texas Instruments
IC DAC 12BIT V-OUT 12USON
WP7113GD
Kingbright
LED GREEN DIFFUSED T-1 3/4 T/H
XC7V585T-2FFG1761I
AMD
IC FPGA 850 I/O 1761FCBGA
LQW15AN51NJ00D
Murata Electronics
FIXED IND 51NH 210MA 1.08OHM SMD
NZL5V6ATT1
onsemi
TVS DIODE 3VWM 9.97V SC75 SOT416
MC100EPT20DT
onsemi
IC XLATOR TTL/CMOS-PECL 8TSSOP
C1608C0G1H080C080AA
TDK Corporation
CAP CER 8PF 50V C0G 0603
AD8674ARUZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14TSSOP -

LT6703IDC-2#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 3DFN
AD5755ACPZ
Analog Devices Inc.
IC DAC 16BIT V/A-OUT 64LFCSP
EPM7160SQC160-6
Intel
IC CPLD 160MC 6NS 160QFP
MAX158BEWI+
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT 8CH W/MUX&REF 28SOIC
SA605D/01
NXP USA Inc.
AUDIO SINGLE CHIP RECEIVER
SLG7NT4229V
Renesas Design Germany GmbH
CMIC, PWROK GENERATOR AND STARTU
170M4410
Eaton - Bussmann Electrical Division
FUSE SQUARE 315A 700VAC RECT
STTH5L06FP
STMicroelectronics
DIODE GEN PURP 600V 5A TO220FPAC
1812SC103KAT1A\SB
KYOCERA AVX
CAP CER 10000PF 1.5KV X7R 1812
HEDS-9710#R50
Broadcom Limited
ROTARY ENCODR OPTICAL 200 LPI
MAX825ZEXK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
T491C106K025AT7280
KEMET
CAP TANT 10UF 10% 25V 2312
LT1719IS6#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR TSOT23-6
VI-J54-CX
Vicor Corporation
DC DC CONVERTER 48V 75W
TPS73433TDDCRQ1
Texas Instruments
IC REG LINEAR 3.3V 250MA SOT23-5
ICL7107SCPL
Renesas Electronics America Inc
IC DISPLAY DRIVER 3.5DIGIT 40DIP
H11D2SD
onsemi
OPTOISO 5.3KV TRANS W/BASE 6SMD
ZVP2120GTA
Diodes Incorporated
MOSFET P-CH 200V 200MA SOT223 -

MAX3378EEBC+T
Analog Devices Inc./Maxim Integrated
IC TRANSLTR BIDIRECTIONAL 12UCSP
VI-812076B
Vicor Corporation
M 18/36/24 48V/ 4.17A
DAC43701DSGR
Texas Instruments
IC DAC 8BIT V-OUT 8WSON
S-80846CNUA-B87T2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT89-3
0402ZC471JAT2A
KYOCERA AVX
CAP CER 470PF 10V X7R 0402
TPS22976NDPUR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 14WSON
MTFDDAV256TBN-1AR1ZABYY
Micron Technology Inc.
SSD 256GB M.2 TLC SATA III 3.3V
FDC8886
onsemi
MOSFET N-CH 30V 6.5/8A SUPERSOT6
1812AC222JAT1A
KYOCERA AVX
CAP CER 2200PF 1KV X7R 1812
M4T32-BR12SH6
STMicroelectronics
SNAPHAT BATT/CRYSTAL FOR SOIC
SIHG47N60AEF-GE3
Vishay Siliconix
MOSFET N-CH 600V 40A TO247AC
SR295E104MARTR1
KYOCERA AVX
CAP CER 0.1UF 50V Z5U RADIAL
P6KE56CA
Littelfuse Inc.
TVS DIODE 47.8VWM 77VC DO204AC
ADP2102YCPZ-1.2-R7
Analog Devices Inc.
IC REG BUCK 1.2V 600MA 8LFCSP
IRFZ34NSTRLPBF
Infineon Technologies
MOSFET N-CH 55V 29A D2PAK
MAX5105EEP+T
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 20QSOP
ST72F623F2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 20SOIC
XRT91L80IB-F
MaxLinear, Inc.
IC TRANSCEIVER FULL 196STBGA